2026-06-24 08:00:00
Music took me through several life changing experiences. This article goes through the arch that culminated with one of the most exciting periods of my life1.
My first consequential contact with music was while working on a school project at a friend’s place. He was playing in a band at the time, and showed how to play the initial riff from Nirvana’s “Come as You Are”. My music culture was asymptotic to zero, so I had no idea what he was playing, but it sounded nice. He invited me to try it out, gave me guidance while I contorted my fingers, and eventually something came out that was close to audible. I was mesmerized.
I thought this instrument could only be tamed by rock demigods, yet, I was able to play a simple riff that made me see that I too, could steal some of that power.
Shortly after I got my first guitar, a classical one. I was around 14 years old.
Guitars all looked the same to me, so I bought the guitar from a supermarket chain. If it looks like a guitar, sounds like a guitar, and it is cheap, then it is a guitar.
The first thing I tried was to repeat the riff on the guitar. It was simple enough that I was able to memorize in that single session, so I just kept playing it until exhaustion.
Eventually I wanted to try new songs. My friends loved Metallica, and I got infected by the bug once I listened to S&M, a wonderful mixture of metal and classical music. It was powerful, sounded amazing, and transpired a non-trivial musical complexity that allured me.
Naturally, I tried to replicate my favorite songs from the album. Call of Ktulu, Battery, Fuel, Master of Puppets, Sad but True, One, Enter Sandman, Nothing Else Matters. I got the mp3’s, I got the tabs. I failed miserably. Turns out that they are demigods for a reason.
It took me ages to go from something that was physically hurt to hear, to something that more palatable.
I cherished any opportunity to show my newly acquired skills. At school, friends house’s, random events, anywhere. I remember that one of the things that made me the most happy when going to any event was knowing it had a remote possibility of having available guitar that I could grab and play.
The allure of it was mixed: part of it was the pleasure of the music itself, part of it was seeing it as a way to get recognition and attention, such as from my crush.
She liked Smashing Pumpkins. It wasn’t a favorite of mine, but there were a few songs I liked. I learned some riffs from Bullet With Butterfly Wings, 1979, Tonight, Tonight, and eventually the opportunity arrived to play some of these riffs in her presense. I can still taste the nervousness. She wasn’t particularly impressed, but hey, she later on gave me a copy of Metallica’s S&M.
I wasn’t getting all the results I wanted, and my classical guitar didn’t allow me to properly try the solos from the greats. Surely the guitar was the problem, so I got a second hand electric guitar Fender Stratocaster clone. I didn’t even know what a Stratocaster was, let alone how it worked or the differences between the different electric guitars. I just wanted something closer to what Metallica’s members had.
I needed an amp, and it just so happened that another friend of mine - who was also playing in a band - was selling his old Marshall amp, so I bought it from him.
Reality hit me fast. Turns out the solos were incredibly complicated to pull off, specially without any having a clue of musical theory, and setting the amp just right to make it sound amazing was a tedious chore.
I would start playing the electrical guitar, set up the amp to something I could bear and roughly close the sound I was looking for, but regardless of its variation, I didn’t like the ear piercing metallic sounds coming from that electrical object. Invariably I would come back to my trusty, warm sounding, cheap guitar.
The nice thing about having an electric guitar was that I could join my friends for studio sessions without needing to rent a roadkilled guitar. There, we would play / slaughter our favorite songs, including religious ones, which we invariably gave a metal twist.
While visiting my father’s hometown during summer, my cousin brought me along on one of the town’s folklore group bus trips, and I experienced what it was like to be embedded in a music group. I loved it.
Coming back home, back to university, I kept asking myself how I could get another hit from that experience. There were no folklore groups in Lisbon, but there was something similar: tunas.
A tuna is a group of university students in traditional university dress who play traditional instruments. It’s not fish.
I didn’t particularly like the academic scene, the “praxes” (where older students make the younger ones go through a series of humiliating tasks or challenges), and the accompanying drinking culture, but I bit the bullet and got myself enrolled into my university’s tuna (TUIST).
Rehearsals were hosted on a far away campus and took a considerable effort to attend the rehearsals, but I came to cherish the challenge.
The first time I attended a rehearsal, newbies like me were being assigned to a voice category. Until me, others were singing some example song snippets or just plainly stating their voice range. I only needed to talk. Immediately a tuna “veteran” just said “Haha! This one is easy. Bass.”
I didn’t know anything about the tuna at the time, but quickly started to find out that it had some beautiful songs, and that I was supposed to learn them on the guitar, and also be able to sing them.
The learning process was a mix of practicing at home using the chord, tab sheets, or “guitar pro” files, or midi files, and in-person tutoring where an experienced player would teach voice sections or riffs. I was lucky to have great mentors there, and was able to learn a good amount of the group’s songs. At the same time, I was also having some classical guitar lessons at a local school with some friends, which helped get a better feel for reading sheet music.
I travelled and played with the group to festivals around the country, did street performances with the group, attended a retreat, spent an immeasurable amount of time in rehearsals and practicing, but soon I learned that the thing I liked the most was when we were just randomly chilling in bar or outside with our instruments, and we started playing some songs. It was amazing. Passerbys stopped to listen and genuinely seemed impressed, and the whole thing sounded great to me at least.
About the time I was coming to grips with TUIST, I came into contact with other folks in my campus that also wanted to be part of a tuna, but wanted something more local. Our university had a male tuna (TUIST, the one I was in) and a female one (TFIST), but not a mixed one. There was an opportunity, so we took it and created TMIST.
At this point, I was dividing my time between TUIST, TMIST, my recently started role in an amazing startup and partly helping around my parent’s company. I learned the value of efficient time management, and that I was able to do a lot of things in a single day. I just needed to be thoughtful of where I invested my energies and planned ahead.
As time passed, I came to learn more about another tuna that some of the TMIST members were also part of: TAL.
Some of my friends joined TAL rehearsals to get to know the group, and I was hooked. The group was musically led by a classically trained maestro that was part of one of Portugal’s best orchestra’s, and he had made arrangements to most of the groups songs. This, coupled with members that were either gifted, semi-professional, professional, or highly motivated, an environment that incentivized mutual respect, the fact that my friends were aiming to join the group, and the high musical quality bar, made this something I wanted to be a part of.
I became deeply involved in the group, in festivals, activities, rehearsals, anything. This culminated in the celebration of the group’s 10th anniversary, where we hosted an unforgettable, beautiful live concert, which we made available in a DVD afterwards. This was one of the songs2:
TAL: Um Homem na Cidade
Throughout this time I came to appreciate the beauty of good music, but I never attempted to fully play and sing on my own. I either practiced or soloed guitar and then murmured the songs, or fully vocalized when in a group, but never fully explored my own voice and expressiveness. That exploratory dream kept revolving in my mind.
Some time after I got accepted for an internship in Dublin to develop a mobile videogame for a transmedia company, and got curious about another string instrument: the ukulele. All of this because of a single song from Miguel Araújo, called Readers Digest. As much as I tried, I could not reproduce it using my guitar, so I bought a ukulele, and only a about year later I was able to get the entire thing down:
Readers Digest - Ukulele Instrumental Cover
In the meanwhile, I realized that I was able to play several of the songs I had originally learned on the guitar, and wondered what else I could do with that.
Dublin had a strong busking culture and I was enamored with the idea that, in case I would lose everything, I could still rely on my limited musical skills to get some basic income via busking. I wanted to put that idea to the test.
I practiced until exhaustion seven songs:
After some research I found a good candidate place to attempt by busking experiment: Waterford. Not only was it a popular busking spot, but also far far away from Dublin, where absolutely no one would recognize me. If I was going to bomb, then it better be somewhere remote to contain the damage.
I got on a bus to Waterford during a weekend day, armed with my ukulele and red piece of cloth from a promotional bag to coat the ukulele case, to make it pop for tips.
There was a festival running that weekend at Waterford, so upon arrival I started probing for a good place to set up shop. I became awfully aware of many details: my uncontrollable stagefright, how much traffic a given road had, how much of this traffic was rolling or stagnant, if a given spot far enough from other buskers that it would not interfere with them (and vice versa), and the type of crowd passing by (locals, tourists, etc).
I kept trying to find the perfect place, but in reality I was scared out of my skin to sing and play in public. I felt vulnerable and was afraid of being judged and booed off.
At some point, after finding a good place to start off, I waited for an adjacent act to finish so I could take my spot. “It is getting nearer to the end of day, it is now, or never” - I thought.
I took the spot, got my ukulele out and started playing some chords, and sang “Cantarei” hesitantly. I don’t think I’ve ever been this nervous in my entire life. I finished the song and started playing some chords as preparation for the “Yellow Submarine”. In this, a girl placed some coins in my tip bag. I was in awe. I got a few coins just by playing a series of Fs and Cs.
I started playing “Yellow Submarine”, which got some more attention, but still I was a nervous wreck.
I played these two songs a few more times, and closed with “I’ll See You in My Dreams”. I had already gathered a few coins, so packed up and got to another place I pinned before, which was more exposed and had an oval shaped opening that seemed ideal to amplify sound. The previous busker had moved out, so I had it all to myself.
Again I set up shop, and started playing, this time more at ease. People passed by and dropped a few coins. I would do a few pauses when I had forgotten the lyrics, but never stopped playing. I learned with tunas that, if you make a mistake, you should just smile and move on. I did that, many times.
At some point, a woman stopped in front of me, and would not move until I looked her in the eyes. I looked at her and drew a sincere smile. She smiled back, deposited some coins, and drove off.
I also noticed that some passerbys came back some time later to listen, and when finishing my last song, a group of girls passed by me and said “You should be on the main stage”. Unexpected, to say the least.
The day was drawing to a close and I needed to get on the bus back to Dublin. I left Waterford with a huge smile on my face, and once I got home I carefully counted all the coins. A grand total of €13,19. It didn’t cover my €19 return bus trip, but I was ecstatic. I couldn’t believe that all these people paid me for playing these songs.
I came to the conclusion that busking is one of the purest entertainment art forms. There is immediate sincere feedback on whether people like it or not. The distancing I experienced and seen in regular concerts felt much more artificial after this experience.

Some time passed, and in 2013 I moved to Berlin to work as an Android engineer for SoundCloud, where I worked for 2 years. It was a humbling experience where I learned a lot about myself and professional best practices. It was pivotal in many ways. This blog and my open source contributions would likely not exist if it weren’t for the influences I got from there.
Berlin is the kind of city that you either love or hate. I loved it, and the more I lived in it, the more I came to appreciate its vibe, the fomentation of respect towards the other, and the ubiquitous artistic expressiveness.
The city welcomed artistic expression, but SoundCloud took it to another level. From company parties where employees formed bands rocked our socks off, the exposure to artists, to having a fully equipped studio where we had the opportunity to participate in a master class.
I joined one of the studio classes, where we produced music end to end. In the end my contributions didn’t amount too much (if anything) in the final product / song, since my colleagues were leagues ahead of me in terms of musical prowess, but still I was to absorb one or two things from the session that I used later on when producing the audio for Survival Ball
After so much exposure to art expression, I started thinking again about my own. This environment seemed ideal to explore my own musical expressiveness and I was curious to know how much I could transfer the knowledge I had accumulated in the guitar, into the piano.
Back in my first job, when I was juggling TUIST, TAL and my first software engineering job, we had at some point access to a grand piano, where I would go to at night and practice tunes I had previously learned on the guitar, like this one:
Se crês em deus (Cantarei) - Piano Cover
I thought to myself: “How can I get access to a training room that allows me to not only sing as loud as I can to explore my full range of expressiveness, but also give me access to a grand piano? Surely in Berlin there must be something”
There was, and it was surprisingly cheap and convenient. For €5 per hour, I could get access to a training room that was somewhat sound proofed, and had access to a grand piano. I couldn’t believe my luck.
The first song I tried was “Sol de Inverno”, a portuguese song that we often played at TAL, which I had deeply interiorized for the guitar. Upon my first attempt, my performance was lacking and I could tell that I needed further training before putting that cover out. I decided that once I felt more at ease with my voice and piano playing, I would try again to re-record it. After multiple attempts, eventually this came out:
Sol de Inverno - Piano Cover
Another hurdle was the practicing itself. Spending time at the studio learning how to play the song seemed counter-productive, so I bought a small USB piano that I connected to my MBP’s GarageBand, allowing me to practice the core parts of any song.
The process was simple: get the chords, just like I would for the guitar, attempt to apply them to the piano keyboard, iterate on it and add sections that would make it sound closer to the original song, memorize any lyrics I didn’t know up until then, go to the piano studio, place my laptop on top of a sheet music stand, attach a USB microphone, start recording and do as many runs as needed until I got it just right.
There was a song that deviated from this process, which was “Podia Acabar o Mundo”, from Herman José. That music was incredibly beautiful due to the interesting progressions and musicality that Herman added, and no chord reference was available, so I ended up dissecting a video of him playing the song and attempted to replicate his playing, which culminated into one of my all time favorite recordings, even though my piano skills at the time were atrocious:
Podia Acabar o Mundo - Piano Cover
During this time, I was really happy with how some of the songs turned out, like this one, which I had previously played several times on the guitar:
Sozinho - Piano Cover
And this one, which felt comfortable for my voice range, and where I could notice my piano skills getting a bit better:
Primeiro Beijo (Rui Veloso) - Piano Cover
At that point I still had a day software engineering job, so there were only so many videos I was able to pump out. A voice in the back of my mind kept asking me “What if? What if you just go all in and try to do this full time? How far can I get this passion of mine?”. This was interlaced with a variant of what drove me to learn Smashing Pumpkins songs earlier in my youth, I wanted to impress, surprise and offer this side of me to whom I cherished.
After almost 2 years working myself to the ground (which started affecting my health), feeling the imminent need to return to Portugal to give my helping hand to family affairs, and feeling more stable financially, I began to seriously consider resigning.
I couldn’t just quit out of the blue, I needed a plan, so I carefully devised a summer 4 month plan specifically targeted to play piano and recording covers. I knew where I could play and record my covers, how much I could spend on rent, food and other misc items, and added to this I also wanted to live Berlin to the fullest, learn German and really feel free to do what I wanted most.
I knew that it was now or never. If I would not try it, very likely I would not have had another shot. I decided to take the leap. After almost one year of intermittent planning, I handed out my resignation letter and kick-started my adventure.
I moved from a fancy neighbourhood into a flat with two other people, got myself enrolled into German classes (where I didn’t learn much, but got to know some really interesting people), and eventually joined a chorus. The chorus per se was nowhere close to the quality of any of the tunas I frequented before, and none of the songs had arrangements as interesting and beautiful as the TAL ones.
The post-chorus karaoke sessions were the main reason that kept bringing me back to the chorus. Karaoke at Monster Ronson’s Ichiban Karaoke with folks from the choir + random people was incredible. I am yet to find anything that comes close to it. These karaoke sessions were also a great way to get to know about new songs that I could record later on, or to quickly test how a particular song felt like singing, and how the crowd reacted to it.
Everything revolved around the musical covers I shared in the Musik Wald channel4. I knew I had limited time available, so I packed as many recordings as I could. From my time making sporadic covers while employed, I knew my song process worked consistently for any song, so I just cranked it to the max. Every week I was recording 3 to 4 songs.
With each song, I could observe my piano skills and voice control getting progressively better. I also tried to plug in the gaps of parts of musical theory that I had always lacked, which helped me later on when trying to understand what makes a solo predictably sound good.
Many of these aspects came together in “Wonderful World”, where I felt more comfortable playing piano and found a sweet spot for my voice. I stumbled upon this song in one of the post-chorus rehearsal karaoke sessions. I was marvelled with how well the song fit my voice, and could tell as much from the crowd’s reaction. This cover was the result of all that:
Louis Armstrong - Wonderful World - Piano Cover
I was really happy with how so of other piano covers came out, such as this one where I felt voice to be silky smooth:
Yesterday [Beatles] - Piano Cover
A beautiful song from Air, where I vocalized the saxophone:
Playground Love [Air] - Piano Cover
And this wonderful song from Marisa Monte, which was a joy to sing and play:
Amor I Love You - Piano Cover
I had brought along the ukulele I bought while living in Ireland, and wanted to try a few songs. The instrument’s portability meant it could be played virtually anywhere, so I started thinking about possible places where I could record some songs using it.
I rode my bike everywhere in Berlin, the infrastructure and environment were incredibly bike friendly, so I started probing for some secluded places where I could record and sing to my heart’s desire. No need to rent a place for that.
I found an area around Berlin in the middle of the woods that was close to being deserted, which became my official outside studio.
For some reason my cover of a popular portuguese song was one of the most popular ukulele covers the channel had, but these were two of my favorites:
I’ll See You in My Dream - Ukulele Cover
You’ve got a friend in me - Ukulele Cover
Each recording in the woods required its own custom primal tech setup, but eventually I found this sweet little spot that ended up being used in the two videos above:
After such intense piano practice and recording, and such bad technique and posture, it led me to strain my wrist, which mutated piano playing from a joy to a pain. I couldn’t afford to take a break, so I bought a used acoustic guitar and did most of the remaining covers using that guitar, while occasionally playing a sporadic piano song, wrist allowing.
The guitar cover I am most proud of is “Tarde em Itapoã” 5, whose original version had me mesmerized by its incredible solos. Using some of the music theory I had been exploring I tried to piece together my own solo for it. It is not perfect, but it was a milestone for me:
Tarde em Itapoã [Toquinho & Vinícius de Moraes] - Guitar Cover
One guitar cover that got some substantial attention was “Recordar é Viver”, which I recorded somewhat jokingly by exaggerating the sentiment in the song, as it was private joke amongst my group of close friends, but the end result was a surprising interpretation where even my voice came out with a clean and wide range:
Recordar é Viver [Victor Espadinha] - Guitar Cover
There were a few others that I enjoyed and sounded good to me, but if I had to highlight one more, it would be this one:
Corcovado [Tom Jobim] - Guitar Cover
As I accumulated recordings and experiences I started yearning for doing some collaborations with other people, and had videos that could showcase what I had to offer.
I posted on craigslist my availability for doing a collaboration, and started talking with some of the people who were interested. Patzi was one of them. We exchanged some messages, and eventually met for piano practice to try some songs. Afterwards we discussed possible songs we could record, and Lana Del Rey came up. I was first introduced to Lana Del Rey in one of the karaoke sessions, where someone interpreted “West Coast”, which quickly became a karaoke favorite of mine.
Patzi proposed we try “Driving In Cars With Boys”. I gave it a whirl on the guitar, added a bossa nova twist to it and during an afternoon we recorded the entire thing. The camera battery died right at the end of the best and last take we recorded. That’s why the video blacks out in the end. It was completely by chance, but it turned out to look quite cool:
Driving In Cars With Boys (Cover)
This was not the first time I had done a collab though. 2 years before, in Portugal, my friend Andreia was doing 30 covers in 30 days, and invited me to play two songs on the guitar. One of them being “Homem na Cidade” (a song I love to play), and another where I lent my crackling voice, where Andreia did an awesome job piecing everything together into this final product:
After recording so many covers and learning a bit more about music theory, I started wondering if I could extend this further. Could I do an original? Turns out that yes, I could, three even.
The first one was “Hot Cheetos”, based on /u/LordDeathGuy’s “Hot Cheetos Haiku” post on Reddit’s Shitty Poetry. This was the last original I produced in Berlin, and I think it turned out pretty great. I love the bridge:
Hot Cheetos [Shitty Poetry - Song]
The second was inspired by the composition made by /u/CombativeAccount on Reddit’s writing prompt: “A clown has a nervous breakdown at children’s party and gets real with the kids”. It is more experimental, and the final result was interesting:
Bozo the Clown (gets real)
But my first original brought home the cringe prize, I still love it anyway:
Cheesy Love Song
Summer was ending, colder days were approaching, my return to Portugal was imminent, and my time was running out. It dawned on me that this could likely be the last time I would dedicate this much amount of time, energy and effort into music, so I wanted to finish it appropriately.
I chose a song from Marisa Monte, “A Sua”, which I recorded using my GoPro. It was the only song where I disclosed my face.
I was developing a cold, so my voice was shutting down. After finishing the definitive take, I could sing no more, and was tired beyond redemption. “This is it”, I thought. In a way, this song represented closure and grieving, but also celebration of an era that brought so many beautiful things. I still remember that day.
A Sua [Marisa Monte] - the Final Cover
I only uploaded this song about 7 years later. Just like busking, showing my face made me feel vulnerable, but I had grown to appreciate the beauty of being vulnerable and accepting the challenge. I’m glad I took that step.
After my Berlin experience and its 50 music recordings, I concluded that music wasn’t what I wanted to focus on long term, and made me realise just how much I loved software engineering.
Playing music was not something I was naturally good at, and at its core required a lot of repetition, muscular training and quick reflexes. It was hard, repetitive work which stimulated parts of my brain that engineering couldn’t, but as these four months progressed, I began craving deep intellectual stimulation. Software engineering brought me not only food for the mind, but also safety, creativity, opportunities, financial stability, the ability to create, and was something I generally felt good at.
I realized how much of my musical expression came from the need to be heard and understood, the need to express myself to others. It fulfilled my ego’s needs. This was not necessarily good or bad, but I wanted to shift more towards serving and helping others, not just myself.
I also did not enjoy the general environment around professionalized creative environments where many seemed to fight for a spotlight or a good position. In contrast, software engineering felt different, it was not a race to the bottom. As an engineer I felt valued and recognised, while being provided very good working conditions.
Music is a magnificent hobby that will accompany me until the end of time, but these valuable learnings allowed me to mathematically prove to myself that software engineering was my true calling. From that point on, I had zero issues going all-in into software engineering, as I do today.
I had the dream of being a guitar demigod, but it turns out that being a flawed mortal geek is pretty sweet as well, and is an abundant source of long-term satisfaction. I needed to discover that for myself.
“Don’t let your dreams be dreams”. Make them happen, and see for yourself if those dreams were really that good.
It took me several months to put this article together. This theme is close to my heart, so I wanted to get it right. I shared bits as pieces with several people, but never recounted the whole story from end to end, even to myself. The mere process of writing this piece made me realise how all of these experiences connect together, even if in non-obvious ways. It also made me appreciate the important role of everyone who influenced, mentored, supported, shared, and/or accompanied me throughout this ride. In case you are one them reading this, thank you. I mean it.↩
At this point I already had a new “António Carvalho” guitar, which was a significant step up from my first one. It was a pleasure to play, louder than my first one, and had a warm sound that I loved.↩
Truth be told, I had a lot of fun during those hectic 4 months in Berlin. Friends visited me for tours, endless bike rides and random adventures like going paddleboarding on Berlin’s channels; I came to know and hang out with some really interesting people; €1 doners and veggie burgers that were out of this world; getting into the FKK scene, and being caught; absorbing the wealth of history and museums in Berlin; random parties, events and experiences coming straight out from a movie, like ending up at the rooftop of a building to crash a party where the hosts thought my friends and me were part of the band. Rather, I felt I was living in some kind of entertaining fiction. I can positively say that I had the time of my life.↩
Musik Wald stemmed from my deep appreciation of Grunewald Forest in Berlin, with its mix of beautiful nature, FKK beach, and its abandoned observation tower built on top of World War II rubble, Teufelsberg (Devil’s Mountain).↩
Notice that at this point I was also running my hands to the ground due to the amount of guitar practice I subjected myself to. In “Tarde em Itapoã” the black cloth wrapped around my thumb was actually my sock, since my thumb joint was starting to kill me, due to the pressure it endured against the neck of the guitar.↩
2026-06-21 08:00:00
Ever since 2017 I’ve made at least one long walk or hike per week. I love walking, and shared that passion by organizing several walks via meetup, eventbrite, in my local community, in my company, and with friends.
I’ve accumulated a fair amount of miles under my feet and progressively built a catalog of favorite trails, and an opinion on what makes for an enjoyable walk.
I think many others could benefit from this knowledge, hence why I’ve opened the Out N’ About Walks Store, which is crystallization of all the above, where you will find detailed routes, videos, descriptions and hints about my favorite walks.
I’m really happy with how the store nicely fits on top of all of my investments and further compounds them, rather than being a distraction.
I’ve opened this shop in a single weekend morning. No exaggeration. The process was:
2026-06-07 08:00:00
Ideas come cheap. That’s why my backlog of project ideas keeps growing - there is only so much time and energy.
The recent agentic AI advancements are changing that equation. All of a sudden, projects I long relegated to an uncertain future can now be brought to fruition with a single human pair of hands (read, mine).
A good example of this is vivotime.net. There is no way I could have made it a reality on my own in such a short amount of time, in the midst of my routines and demanding job. AI changed all that. A success story in my book.
My backlog does not only consist of new projects, but also improvements to older ones that ended up getting outdated, or had missing features I long wanted to add.
So in a single weekend I grabbed three of my older longstanding projects, and gave them an overhaul.
I grabbed this now 2 year old project, and gave it a new life with:
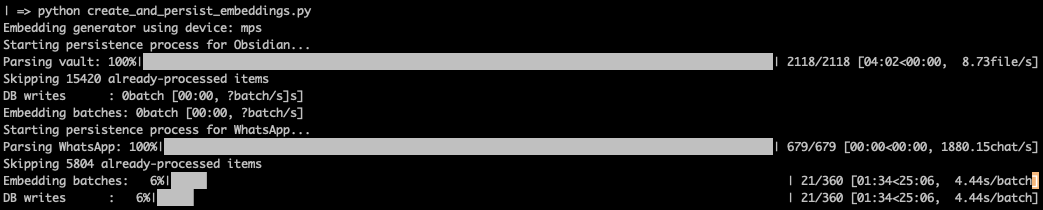
You might be thinking: “That’s cool and all, but I already have LM Studio + Anything LLM, Ollama and OpenClaw”. Those are incredible, but this project offers two unique things:
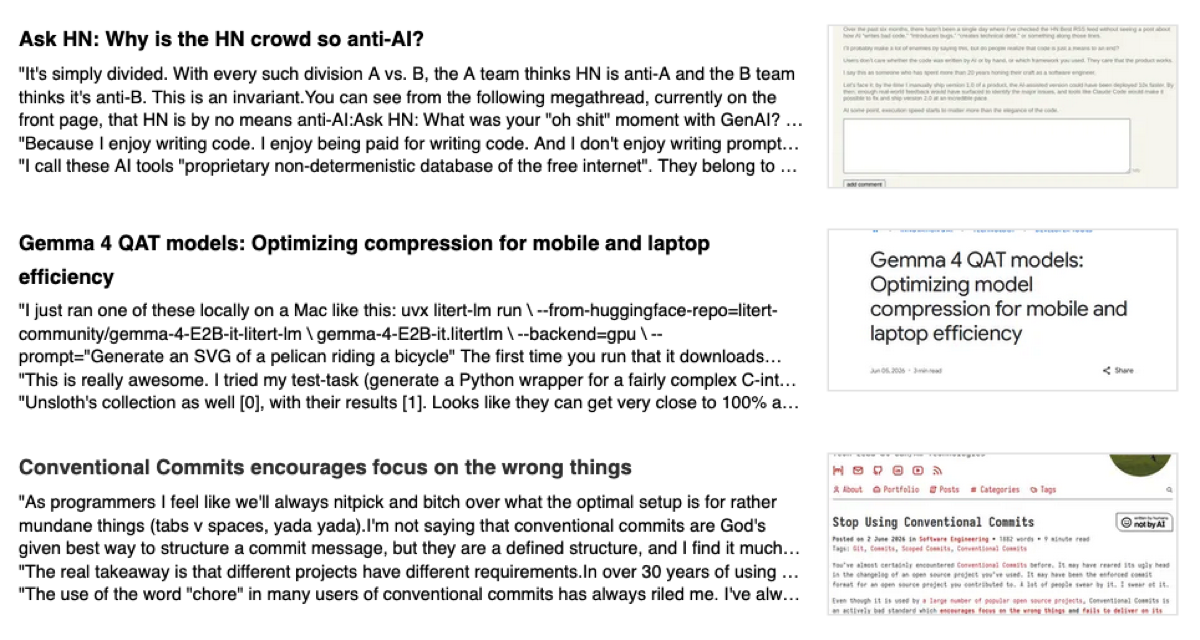
This one was relatively simple. The pipeline was broken for this almost 6 year old project, and the site stopped updating. It is now back online, hardened against rogue errors, like image previews not loading and crashing the build.
Presentation is improved on larger screens as well, with a simple simple change to constrain the max width of the site’s contents.
It is better than ever: https://lopespm.com/hackernews-daily/
There is a nifty user optimization where certain images are presented via their WebP proxy, delivering much smaller file sizes (25-35% lighter than PNG).
The problem is that image editors tend to work best when exporting and working with PNGs and JPEGs, so before, I would need to go through each image, one by one, and export them to WebP via the terminal. This was infrequent enough to make me postpone its automation, but also frequent enough to be annoying.
That is now a relic of the past. Presenting, a completely ordinary script that batch converts PNGs and JPEGs to WebP. Simple utility, high utility value.
I want to eventually revamp Survival Ball, but there is a problem: AI alone won’t cut it, since proper game design iterations, testing and porting it to Mac and Windows are some of the most time consuming tasks.
If I don’t find the time and energy to tackle it, there are other projects itching to come to life, which don’t suffer as much from the above problems. I’ll keep you posted!
2026-05-01 08:00:00
I’ve consumed several Acquired episodes, and one I found particularly interesting was about Nintendo, where they describe how lateral thinking shapes how to company thinks about their products: instead of always going after the new shiny thing that still has several unknowns and will need time to iterate on, know and perfect, use instead cheaper, already established technologies / materials and come up with new ways to use them1
Today LLMs, vibe / agentic coding, and other new technologies are all at rage. This means that a lot of humanity’s headspace is directed towards these new technologies, but there is still an immense unexplored space for the already established tools and technologies that were not fully exploited and combined. For example:
The most important thing at the end of the day is: are these solutions solving a real problem? Are they generating value? Their end user likely doesn’t really care how something was implemented behind the scenes, they just need something to solve their problems.
“Lateral Thinking with Withered Technology” is a defining product design philosophy popularized by Nintendo engineer Gunpei Yokoi. The philosophy posits that mature, well-understood, and inexpensive technology—”withered technology”—can be used in creative new ways (“lateral thinking”) to create innovative, successful products, rather than relying on expensive, cutting-edge hardware.↩
In the spirit of the article, the associated social media thumbnail was created using my favorite open source tool of all time: Blender. It still puzzles me how such a high quality tool is free and open source. I’m grateful for it. Without it, Survival Ball might not have even come to fruition.↩
2026-03-22 08:00:00
There is something interesting about our psyche, or at least mine. Simple and concise rules, when applied for a long time, are much harder to break1 than rules which make room for exceptions, or rules that are broad or ambiguous.
Let me give you an example: I never have desserts at my work office’s canteen. No exceptions. This makes my decision process straightforward: “Should I have a dessert? No. Move on. Nothing to see here”. I’ve been able to maintain this habit for 5 years. If I want a dessert, it will need to be elsewhere, like during a dinner night out.
If I would allow myself for a dessert only now and then, I am pretty confident it would derail my sugar consumption, since “every now and then” would be dictated by how much will power would be available on any given day, and there are days where I just have too much going on and will power is at short supply.
A single dessert at the canteen would break the streak, allowing for optionality to creep in, and deliver me to my limited will’s mercy.
I’ve been consistently accumulating several of these simple rules / habits throughout the past years, which allowed me to build strong foundations, move closer to the type of person I want to be, achieve what I want to achieve, and sustain a high output for a significant amount of time. Here is a list of the most impactful ones:
These simple rules were a boon for me to implement consistent habits, and the reasons why I think they kept working so well are:
They are all so ingrained in my life that if any of them slip, something starts to feel off and uncomfortable, just like any other deep habit or routine that gets halted.
Give them a try. There are rules and obsessions worth having.
Streaks are powerful, so it comes as no surprise that they are a textbook gamification strategy. Take Duolingo, which has a streak feature. Let’s say you use Duoling for seven days in a row, then you have a streak of length seven and if you don’t use it on the eighth day it goes down to zero, so it’s just a counter of how many days you’ve done it in a row. As of April 2025, there were 8 million people who were daily active users with a streak longer than 365 so we have 8 million daily active users that haven’t missed a day over the previous year.↩
2026-02-21 08:00:00
I once struck up a conversation with someone during one of my trips where I told them that there wasn’t a prescriptive way of organising work at the company I was working on at the time. We were not dogmatic in using kanban, scrum, lean or waterfall, we used whatever worked best for the problem at hand, many times resulting in a mix of these approaches, and even changing them mid-project.
Leads and people in the ground were trusted to take ownership and organize accordingly.
My interlocutor, with a disdained grin said “You do that? You don’t do Scrum?”. One could almost hear the “pff, ridiculous” undertone.
I still stand by it. You should not be dogmatic about it in scenarios where the problems keep changing and there is a constant need to adapt. At some point, all companies need to adapt to overcome competition, changing consumer behaviours, regulations, etc. The only thing that really changes between companies is how much time it takes for that change cycle to happen.
It is sensible to have a stable and institutionalised process across a company, when these cycles are long and harmony between people and departments is valued highly, but that same approach in a fast changing environment will the company’s death kneel, crumbling under its own comfortable rigidness.
Overall, the world is moving faster and faster, specially with the ongoing revolution of AI that is slowly creeping through many branches of our society, and the increasing amount of people entering the labor market.
On one of the latest projects I was involved in, where requirements would change very rapidly, and product market fit was crucial to first understand, having bulky processes would have done more harm than good. What actually worked was:
To this day I cringe when thinking about that conversation.
There is not a silver bullet. Processes are like tools. You should use the right one for the right job, combining them when necessary. You wouldn’t use a jackhammer to drive a simple nail.
Don’t be a process zealot. Use it as a means to an objective.