2026-07-31 22:27:10
带着单反漫步泽西岛,用镜头记录海面上的船只、薰衣草间停驻的蝴蝶,以及岛屿上不经意的光影。旅行不仅是抵达远方,也是放慢脚步,在一次次快门声中,重新发现那些容易被忽略的美。 带着单反去了趟 Jersey。 镜头掠过海面上的船,停在薰衣草间振翅的蝴蝶,也偶然捕捉到天空中的无人机。旅行的意义,大概不只是抵达远方,而是在光影流动的瞬间,重新发现那些容易被忽略的美。 海风会吹散记忆,快门替我留住了它们。 📷 Jersey · Summer 2026这次去泽西岛,特意带上了单反相机。相比手机随手记录,单反虽然沉一些,却让人更愿意放慢脚步,认真观察眼前的光线、色彩与构图。 镜头掠过海面上的渡轮与邮轮,停在薰衣草间振翅的蝴蝶,也记录下古老石墙、退潮后的礁石,以及阳光洒落海面的瞬间。远处的船只缓缓驶向海天交界处,近岸的小艇则安静地停泊在树影之间。泽西岛的美并不张扬,而是藏在海风、潮汐和不断变化的光影里。 旅行的意义,大概不只是抵达一个陌生的地方,也是暂时离开熟悉的生活节奏,重新留意那些平日容易被忽略的细节。快门按下的那一刻,留下的不只是一幅画面,还有当时的天气、海风,以及站在镜头后面的心情。 照片或许无法完整还原亲眼所见的风景,却能替记忆保存一些坐标。等到多年以后再次翻看,希望仍能想起这个夏天——泽西岛清澈的海水、缓慢移动的船,以及那段被海风轻轻吹过的时光。
 面朝大海,喝一杯咖啡,把时间交给海风与阳光。[/caption]
[caption id="attachment_72339" align="alignnone" width="2048"]
面朝大海,喝一杯咖啡,把时间交给海风与阳光。[/caption]
[caption id="attachment_72339" align="alignnone" width="2048"] 树影之间,几艘小船静静泊在泽西岛的碧蓝海湾。[/caption]
Jersey 动物园。
[caption id="attachment_72338" align="alignnone" width="2048"]
树影之间,几艘小船静静泊在泽西岛的碧蓝海湾。[/caption]
Jersey 动物园。
[caption id="attachment_72338" align="alignnone" width="2048"] 薰衣草随风轻摆,一只蝴蝶停驻其间,定格夏日的温柔。[/caption]
[caption id="attachment_72337" align="alignnone" width="2048"]
薰衣草随风轻摆,一只蝴蝶停驻其间,定格夏日的温柔。[/caption]
[caption id="attachment_72337" align="alignnone" width="2048"] 远航的渡轮划过海面,驶向海天交界的远方。[/caption]
这个是在 The Lighthouse 灯塔拍的。
[caption id="attachment_72336" align="alignnone" width="2048"]
远航的渡轮划过海面,驶向海天交界的远方。[/caption]
这个是在 The Lighthouse 灯塔拍的。
[caption id="attachment_72336" align="alignnone" width="2048"] 无人机掠过阴云下的天空,以另一种视角俯瞰岛屿。[/caption]
我们住的面朝大海的酒店边上的沙滩。
[caption id="attachment_72335" align="alignnone" width="2048"]
无人机掠过阴云下的天空,以另一种视角俯瞰岛屿。[/caption]
我们住的面朝大海的酒店边上的沙滩。
[caption id="attachment_72335" align="alignnone" width="2048"] 阳光洒落潮湿的沙滩,将海面染成流动的银色。[/caption]
[caption id="attachment_72334" align="alignnone" width="2048"]
阳光洒落潮湿的沙滩,将海面染成流动的银色。[/caption]
[caption id="attachment_72334" align="alignnone" width="2048"] 一艘邮轮停泊在泽西岛近海,安静得像海上的一座城。[/caption]
[caption id="attachment_72333" align="alignnone" width="1365"]
一艘邮轮停泊在泽西岛近海,安静得像海上的一座城。[/caption]
[caption id="attachment_72333" align="alignnone" width="1365"] 透过古老石墙的窗口,凝望城堡之外的海与天。[/caption]
[caption id="attachment_72332" align="alignnone" width="2048"]
透过古老石墙的窗口,凝望城堡之外的海与天。[/caption]
[caption id="attachment_72332" align="alignnone" width="2048"] 礁石散落在清澈的蓝绿色海水中,勾勒出泽西岛的海岸线。[/caption]
[caption id="attachment_72331" align="alignnone" width="2048"]
礁石散落在清澈的蓝绿色海水中,勾勒出泽西岛的海岸线。[/caption]
[caption id="attachment_72331" align="alignnone" width="2048"] 海天之间,一艘小船驶向辽阔而宁静的远方。[/caption]
[caption id="attachment_72330" align="alignnone" width="2048"]
海天之间,一艘小船驶向辽阔而宁静的远方。[/caption]
[caption id="attachment_72330" align="alignnone" width="2048"] 退潮后的礁石与浅滩,在蓝天白云下铺展开来。[/caption]
[show_file file="/var/www/wp-post-common/justyy.com/jersey.php"]
[show_file file="/var/www/wp-post-common/justyy.com/slr.php"]
[show_posts keyword="Jersey"]
[show_posts keyword="摄影"]
英文:Some travel photos, Jersey - Blurt版本
退潮后的礁石与浅滩,在蓝天白云下铺展开来。[/caption]
[show_file file="/var/www/wp-post-common/justyy.com/jersey.php"]
[show_file file="/var/www/wp-post-common/justyy.com/slr.php"]
[show_posts keyword="Jersey"]
[show_posts keyword="摄影"]
英文:Some travel photos, Jersey - Blurt版本
2026-07-30 22:47:13
微软五年,一座水晶杯,一段成长旅程 五载同行,水晶为证 在微软的第五年:一份纪念,一段新起点 五年沉淀,继续前行——我的微软五周年 加入微软五周年:一个值得庆祝的里程碑 加入微软五周年:感恩一路走来 庆祝加入微软五周年 五年,一座水晶奖杯,无数珍贵回忆 加入微软五周年里程碑 五年的学习、成长与影响力 加入微软五周年:旅程仍在继续 水晶见证里程碑:加入微软五周年
MSFT 股票在 2021 年 7 月 5 日(周一)没有交易价格,因为纳斯达克交易所因美国独立日假期(补假)休市。 最近一次交易价格来自 2021 年 7 月 2 日(周五): 收盘价:277.65 美元 调整后收盘价:266.46 美元 开盘价:272.82 美元 最高价:278.00 美元 最低价:272.50 美元 因此,若要对截至 2021 年 7 月 5 日的投资组合进行估值,请使用 MSFT 每股 277.65 美元的价格;若计算历史投资回报率,则请使用调整后价格。
微软2026年财报发布,正式收官,Q4周报全面超出市场预期,盘后股价最大涨9个点。核心数据:全年总营收3318亿美元,同比增长18%,全年净利润1337亿美元,整体净利率40.3%,Q4单季营收900亿美元,同比增长了18%,大幅度高于市场的普遍预期,AI业务交出了两大里程碑的成绩,一个是AZURE云服务单季同比增速高达43%。全年营收首次突破了1000亿,管理层指引下一季度增速还会到达45%左右超预期,这一次的预期本来是39%,二是微软的365 copilot的付费席位突破了3000万,几乎都是企业的批量采购,全球500强企业里超过70%已经部署。万级席位的大客户数量同比翻了4倍。非常牛逼。目前已经交了合同还没交付的长期订单总额达到了6780亿美元。合约 平均周期大概是两到三年左右。未来两年的增速底盘基本已经锁定。微软发布2026财年财报,全年业绩正式收官。第四季度多项核心指标全面超出市场预期,财报公布后,盘后股价一度上涨约9%。 从核心数据来看,微软全年总营收达到3318亿美元,同比增长18%;全年净利润为1337亿美元,整体净利率高达40.3%。第四季度单季营收达到900亿美元,同比增长18%,明显高于市场普遍预期。 AI相关业务交出了两项具有里程碑意义的成绩。 首先,Azure云服务第四季度营收同比增长43%,远超市场此前约39%的预期;Azure全年营收也首次突破1000亿美元。管理层预计,下一季度Azure增速仍有望达到约45%,再次超出市场预期。 其次,Microsoft 365 Copilot的付费席位已经突破3000万个,其中大部分来自企业批量采购。目前,全球《财富》500强企业中,超过70%已经部署Microsoft 365 Copilot;采购席位超过1万个的大客户数量同比增长了4倍,企业级AI的商业化进程正在明显加速。 更值得关注的是,微软目前已经签订合同、但尚未确认收入的长期订单总额达到6780亿美元。考虑到这些合约的平均周期大约为两至三年,微软未来两年的增长基础已经基本锁定。 不得不说,这份财报确实非常强。 [caption id="attachment_72311" align="alignnone" width="1536"]
 还有擦拭的布/印有公司Microsoft的LOGO[/caption]
[caption id="attachment_72317" align="alignnone" width="588"]
还有擦拭的布/印有公司Microsoft的LOGO[/caption]
[caption id="attachment_72317" align="alignnone" width="588"] 这两天微软2026财报出来了股价大涨![/caption]
[caption id="attachment_72316" align="alignnone" width="720"]
这两天微软2026财报出来了股价大涨![/caption]
[caption id="attachment_72316" align="alignnone" width="720"] 加入微软第一天的股价是277美元,所以分配的RSU股票数就是合同上的股票金额除于入职第一天的股价。[/caption]
[caption id="attachment_72315" align="alignnone" width="941"]
加入微软第一天的股价是277美元,所以分配的RSU股票数就是合同上的股票金额除于入职第一天的股价。[/caption]
[caption id="attachment_72315" align="alignnone" width="941"] 这是我收到的第一个水晶杯,每五年会有。[/caption]
[caption id="attachment_72314" align="alignnone" width="1152"]
这是我收到的第一个水晶杯,每五年会有。[/caption]
[caption id="attachment_72314" align="alignnone" width="1152"] 水晶/Crystal上面和底座是分开的。[/caption]
[caption id="attachment_72313" align="alignnone" width="864"]
水晶/Crystal上面和底座是分开的。[/caption]
[caption id="attachment_72313" align="alignnone" width="864"] 底座刻有名字和5年[/caption]
[caption id="attachment_72312" align="alignnone" width="864"]
底座刻有名字和5年[/caption]
[caption id="attachment_72312" align="alignnone" width="864"] 从美国UPS寄到英国,大概三周寄到。7月7号下单的,29号公司前台通知取件。[/caption]
[show_file file="/var/www/wp-post-common/justyy.com/microsoft.php"]
[show_posts keyword="微软"]
领英: Microsoft 5-year Service Award: Anniversary Crystals - 五周年水晶纪念奖
英文:A Five-Year Milestone at Microsoft Anniversary Crystal
从美国UPS寄到英国,大概三周寄到。7月7号下单的,29号公司前台通知取件。[/caption]
[show_file file="/var/www/wp-post-common/justyy.com/microsoft.php"]
[show_posts keyword="微软"]
领英: Microsoft 5-year Service Award: Anniversary Crystals - 五周年水晶纪念奖
英文:A Five-Year Milestone at Microsoft Anniversary Crystal
2026-07-29 23:14:58
这次泽西岛之行,让我对当地独特的车牌文化留下了深刻印象。岛上的车牌大多以“J”开头,辨识度很高,偶尔还能看到数字特别的个性车牌。除了车牌和部分法语地名之外,泽西岛在交通规则、超市品牌和生活方式上都与英国十分相似,既有离岛旅行的新鲜感,又处处带着熟悉的英伦气息。 Jersey泽西的车牌是J开头的 泽西岛见闻:满街都是“J”开头的车牌 从J288888说起:泽西岛独特的车牌文化 泽西岛的车牌为什么都以“J”开头? 开在左边,车牌姓“J”:泽西岛自驾初印象 人在泽西岛,却处处感受到英国的影子 泽西岛四日见闻:车牌、超市与浓浓的英伦气息 小岛上的特殊车牌:泽西岛旅行随记 除了法语地名,泽西岛几乎处处都很英国 一块J288888车牌,引出的泽西岛见闻 泽西岛:既像英国,又不完全是英国这次泽西岛之行,给我留下深刻印象的一件事,就是岛上的汽车牌照几乎全部以字母“J”开头。 在岛上待了四天,我们只看到两三辆挂着英国本土车牌的汽车。英国车牌的字母和数字组合比较多样,而泽西岛的车牌虽然也可以自定义,但基本都以“J”开头,辨识度非常高。
泽西岛拥有独立的车辆登记系统,最常见的车牌格式是字母“J”加上一组数字,例如“J12345”,因此在岛上开车时,一眼就能认出当地车辆。与英国本土车牌不同,泽西岛车牌通常不会通过字母和数字组合来显示车辆的注册年份,整体格式更加简洁。除了普通的“J”系列之外,岛上还有少量以“JSY”开头的特殊车牌。车主也可以申请指定号码,而一些数字较少、排列特别或寓意较好的车牌,则会由当地车辆管理部门公开拍卖,所以像“J288888”这样的号码,往往也具有一定的收藏和炫耀价值。[caption id="attachment_72303" align="alignnone" width="864"]
 泽西岛的车牌左边的国徽标注是GBJ:泽西岛部分车牌的左侧印有岛旗和“GBJ”标志,这是泽西岛注册车辆在国际通行时使用的地区识别标志。虽然其中带有“GB”,但这并不意味着泽西岛属于英国。泽西岛实际上是英国王室属地,拥有自己的政府、议会、法律和税收制度,并不属于联合王国。英国后来将本土车辆的国际标志由“GB”改为“UK”,但泽西岛的车辆仍然继续使用“GBJ”。从一块小小的车牌上,也能看出泽西岛与英国之间既密切相连、又相对独立的特殊关系。[/caption]
旅行期间,我们还看到了一块很特别的车牌——“J288888”,挂在一辆奥迪Q7上。后来也见到了车主,不过并不是亚洲人。看来对“88888”这种号码情有独钟的,也不只是华人。
下次再来泽西岛,我打算体验一下在岛上自驾。可以落地以后租车,也可以直接从英国本土把车开过来,大概和前几年去怀特岛时一样,需要把车开上渡轮。
泽西岛的驾驶规则与英国本土一致,车辆都是右舵,在道路左侧行驶。不过岛上的部分道路比较狭窄,开车时估计还是需要格外小心。
虽然泽西岛在行政上并不属于英国,但除了部分地名带有明显的法语色彩之外,岛上的生活处处都能看到英国的影子。
登岛第一天,我们就去了当地的Waitrose,买了牛奶、面包和饮用水。没想到英国本土的Waitrose会员卡在这里也可以正常使用。岛上还可以看到Marks & Spencer、Co-op等熟悉的英国品牌。
从交通规则、超市品牌到日常生活方式,泽西岛确实充满了浓浓的英伦气息。难怪走在岛上时,既有一种出门旅行的新鲜感,又经常让人觉得自己似乎并没有真正离开英国。
[show_file file="/var/www/wp-post-common/justyy.com/jersey.php"]
[show_posts keyword="泽西"]
泽西岛的车牌左边的国徽标注是GBJ:泽西岛部分车牌的左侧印有岛旗和“GBJ”标志,这是泽西岛注册车辆在国际通行时使用的地区识别标志。虽然其中带有“GB”,但这并不意味着泽西岛属于英国。泽西岛实际上是英国王室属地,拥有自己的政府、议会、法律和税收制度,并不属于联合王国。英国后来将本土车辆的国际标志由“GB”改为“UK”,但泽西岛的车辆仍然继续使用“GBJ”。从一块小小的车牌上,也能看出泽西岛与英国之间既密切相连、又相对独立的特殊关系。[/caption]
旅行期间,我们还看到了一块很特别的车牌——“J288888”,挂在一辆奥迪Q7上。后来也见到了车主,不过并不是亚洲人。看来对“88888”这种号码情有独钟的,也不只是华人。
下次再来泽西岛,我打算体验一下在岛上自驾。可以落地以后租车,也可以直接从英国本土把车开过来,大概和前几年去怀特岛时一样,需要把车开上渡轮。
泽西岛的驾驶规则与英国本土一致,车辆都是右舵,在道路左侧行驶。不过岛上的部分道路比较狭窄,开车时估计还是需要格外小心。
虽然泽西岛在行政上并不属于英国,但除了部分地名带有明显的法语色彩之外,岛上的生活处处都能看到英国的影子。
登岛第一天,我们就去了当地的Waitrose,买了牛奶、面包和饮用水。没想到英国本土的Waitrose会员卡在这里也可以正常使用。岛上还可以看到Marks & Spencer、Co-op等熟悉的英国品牌。
从交通规则、超市品牌到日常生活方式,泽西岛确实充满了浓浓的英伦气息。难怪走在岛上时,既有一种出门旅行的新鲜感,又经常让人觉得自己似乎并没有真正离开英国。
[show_file file="/var/www/wp-post-common/justyy.com/jersey.php"]
[show_posts keyword="泽西"]
2026-07-28 23:30:53
Jersey机场虽然规模不大,却是泽西岛连接英国本土及欧洲其他地区的重要交通枢纽。机场布局紧凑、设施简单,从值机到登机都十分方便,也因此给人一种小而高效的感觉。本文记录了我在Jersey机场的所见所感,以及一段只有四十多分钟、却颇有趣味的返程经历。Jersey机场位于泽西岛西部,是这座海岛连接英国本土和欧洲其他地区的重要交通门户。机场规模不大,整体布局非常紧凑,从值机柜台到安检、登机口,走起来都很方便,基本不会迷路。机场内的商店和餐饮选择不多,却也因此显得简单高效,很有小岛机场的特色。虽然面积不大,但航班主要连接伦敦、曼彻斯特等英国城市,对当地居民和游客来说都十分重要。
 付费手机充电器/1小时2英镑,30分钟1.5英镑。[/caption]
[caption id="attachment_72269" align="alignnone" width="864"]
付费手机充电器/1小时2英镑,30分钟1.5英镑。[/caption]
[caption id="attachment_72269" align="alignnone" width="864"] 付费手机充电器[/caption]
[caption id="attachment_72270" align="alignnone" width="2048"]
付费手机充电器[/caption]
[caption id="attachment_72270" align="alignnone" width="2048"] 和泽西岛有航班的地方/主要是英国[/caption]
[caption id="attachment_72271" align="alignnone" width="2048"]
和泽西岛有航班的地方/主要是英国[/caption]
[caption id="attachment_72271" align="alignnone" width="2048"] Easyjet小飞机,准备飞回LUTON[/caption]
[caption id="attachment_72272" align="alignnone" width="2048"]
Easyjet小飞机,准备飞回LUTON[/caption]
[caption id="attachment_72272" align="alignnone" width="2048"] 准备登机了[/caption]
[caption id="attachment_72273" align="alignnone" width="2048"]
准备登机了[/caption]
[caption id="attachment_72273" align="alignnone" width="2048"] Easyjet的飞机应该是airbus 320/中间只有一个通道,两边各三个,大概不到200个座位。[/caption]
[caption id="attachment_72274" align="alignnone" width="2048"]
Easyjet的飞机应该是airbus 320/中间只有一个通道,两边各三个,大概不到200个座位。[/caption]
[caption id="attachment_72274" align="alignnone" width="2048"] Easyjet的飞机应该是airbus 320/中间只有一个通道,两边各三个,大概不到200个座位。[/caption]
[caption id="attachment_72275" align="alignnone" width="2048"]
Easyjet的飞机应该是airbus 320/中间只有一个通道,两边各三个,大概不到200个座位。[/caption]
[caption id="attachment_72275" align="alignnone" width="2048"] 准备登机飞往泽西岛[/caption]
[caption id="attachment_72276" align="alignnone" width="864"]
准备登机飞往泽西岛[/caption]
[caption id="attachment_72276" align="alignnone" width="864"] 在Easyjet上点餐是要钱的[/caption]
[caption id="attachment_72277" align="alignnone" width="864"]
在Easyjet上点餐是要钱的[/caption]
[caption id="attachment_72277" align="alignnone" width="864"] Jersey的航班信息显示[/caption]
[caption id="attachment_72278" align="alignnone" width="2048"]
Jersey的航班信息显示[/caption]
[caption id="attachment_72278" align="alignnone" width="2048"] 欢迎来到泽西,Home of Bergerac 贝尔热拉克之乡[/caption]
[caption id="attachment_72279" align="alignnone" width="2048"]
欢迎来到泽西,Home of Bergerac 贝尔热拉克之乡[/caption]
[caption id="attachment_72279" align="alignnone" width="2048"] 打车到机场,这个机场的标识很不显眼。[/caption]
[caption id="attachment_72280" align="alignnone" width="2048"]
打车到机场,这个机场的标识很不显眼。[/caption]
[caption id="attachment_72280" align="alignnone" width="2048"] Jersey机场的停机位也就11个左右。[/caption]
[caption id="attachment_72281" align="alignnone" width="2048"]
Jersey机场的停机位也就11个左右。[/caption]
[caption id="attachment_72281" align="alignnone" width="2048"] Jersey机场很小,只有一个免税店,没啥逛的。[/caption]
[caption id="attachment_72282" align="alignnone" width="2048"]
Jersey机场很小,只有一个免税店,没啥逛的。[/caption]
[caption id="attachment_72282" align="alignnone" width="2048"] 泽西机场的航班很少,一个屏幕就能显示完,晚上最晚一班航班7点多,就能下班了。[/caption]
回英国的时候也是直接入境,没有人检查护照,下飞机是从 Arrival from Republic of Ireland and Jersey,从爱尔兰过来的也不用过海关。(降落Jersey没有海关/Passport Control,回英国的时候也没有!)
[caption id="attachment_72283" align="alignnone" width="864"]
泽西机场的航班很少,一个屏幕就能显示完,晚上最晚一班航班7点多,就能下班了。[/caption]
回英国的时候也是直接入境,没有人检查护照,下飞机是从 Arrival from Republic of Ireland and Jersey,从爱尔兰过来的也不用过海关。(降落Jersey没有海关/Passport Control,回英国的时候也没有!)
[caption id="attachment_72283" align="alignnone" width="864"] 降落Jersey的时候没有Passport Control就直接入境了,没有海关![/caption]
[caption id="attachment_72284" align="alignnone" width="864"]
降落Jersey的时候没有Passport Control就直接入境了,没有海关![/caption]
[caption id="attachment_72284" align="alignnone" width="864"] 在Jersey机场的安检,没收了很多防晒霜,我想起去年在巴黎机场回来的时候,问安检我带的防晒霜能否带,他说你放边上就好。[/caption]
[caption id="attachment_72285" align="alignnone" width="2048"]
在Jersey机场的安检,没收了很多防晒霜,我想起去年在巴黎机场回来的时候,问安检我带的防晒霜能否带,他说你放边上就好。[/caption]
[caption id="attachment_72285" align="alignnone" width="2048"] 从Luton起飞,降落到Jersey机场。[/caption]
我去过的机场:我去过的机场列表 2004-
[show_file file="/var/www/wp-post-common/justyy.com/jersey.php"]
[show_posts keyword="机场"]
从Luton起飞,降落到Jersey机场。[/caption]
我去过的机场:我去过的机场列表 2004-
[show_file file="/var/www/wp-post-common/justyy.com/jersey.php"]
[show_posts keyword="机场"]
2026-07-23 23:38:17
娃在Perse私校的第一学年结束了,三个学期的学费合计超过三万英镑,再加上滑雪旅行、校服和各种活动费用,养娃的经济压力远比想象中更大。虽然私校学费昂贵、假期也更长,但这一年里,我们也看到了孩子在学习习惯、自我意识、表达能力和主动性方面的成长。私校买不到确定的成功,却能提供更稳定的环境、更多的机会,以及相对更集中的学习氛围。孩子负责成长,父母负责托底,接下来的几年,我们还要继续一起努力。 娃上了一年私校后的改变 三万英镑学费之后:娃的第一年私校生活 他上完了一年私校,我也交完了一年学费 一年169天,每天178英镑:私校到底值不值? 钱包漏了个大洞:娃在Perse的第一年 中产返贫实录:孩子上私校的第一年 一年学费三万英镑,私校买的是成绩还是环境? 娃说Perse是个Scam,但这一年他确实成长了 程序员养娃账单:三万英镑学费只是开始 私校第一年总结:钱花了,成长也看到了 他负责学习,我负责赚钱:私校第一年结束了[caption id="attachment_72251" align="alignnone" width="550"]
 01[/caption]
01[/caption]
 02[/caption]
02[/caption]
 03[/caption]
03[/caption]
共 169 个上学日 按照 剑桥 Perse Upper School 的校历计算,从 2025 年 9 月 3 日到 2026 年 7 月 2 日,统计周一至周五的正常上课日,并扣除期中假期、银行假日以及学校公布的教师培训日: 学期 计算方式 上学日 秋季学期 72 个工作日 − 7 个期中假期日 65 天 春季学期 59 个工作日 − 5 个期中假期日 54 天 夏季学期 57 个工作日 − 1 天银行假日 − 5 个期中假期日 − 1 天教师培训日 50 天 合计 65 + 54 + 50 169 天 学校公布的主要日期如下: **秋季学期:**2025 年 9 月 3 日至 12 月 11 日 期中假期:10 月 24 日至 11 月 3 日 **春季学期:**2026 年 1 月 6 日至 3 月 27 日 期中假期:2 月 16 日至 20 日 **夏季学期:**2026 年 4 月 15 日至 7 月 2 日 期中假期:5 月 25 日至 29 日 **5 月 4 日:**英国五月银行假日 **6 月 1 日:**Upper School 教师培训日(INSET Day) **7 月 2 日:**最后一个上学日,中午放学 即使最后一天只上半天,我仍然将其计算为一个完整的上学日。 另一种可能的计算:170 天 如果学生是 Year 7 至 Year 10,并且把 2026 年 6 月 20 日星期六的 Prize Giving 颁奖典礼视为必须到校的一天,那么总数可能是: 169 + 1 = 170 天 不过,按照通常只计算周一至周五正式上课日的方式,答案是: 169 个上学日[caption id="attachment_72238" align="alignnone" width="2048"]
 娃在家的学习的地方[/caption]
[caption id="attachment_72239" align="alignnone" width="2048"]
娃在家的学习的地方[/caption]
[caption id="attachment_72239" align="alignnone" width="2048"] 我去学校接他,好多车排队,得等校车走了才能走。[/caption]
[caption id="attachment_72240" align="alignnone" width="864"]
我去学校接他,好多车排队,得等校车走了才能走。[/caption]
[caption id="attachment_72240" align="alignnone" width="864"]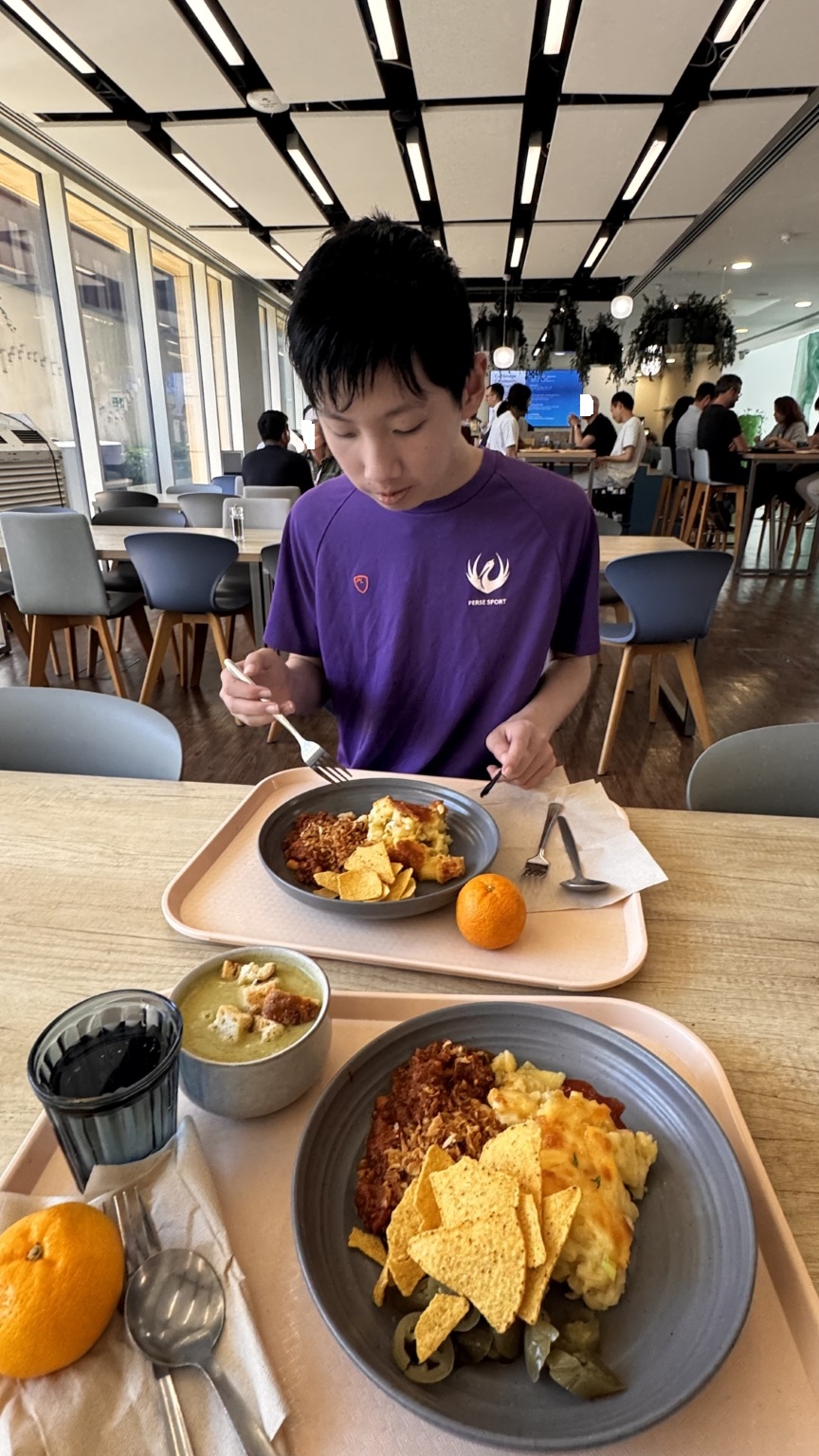 和娃一起吃午餐,主餐5.1英镑,水果/饮料免费。汤1.99[/caption]
[caption id="attachment_72241" align="alignnone" width="2048"]
和娃一起吃午餐,主餐5.1英镑,水果/饮料免费。汤1.99[/caption]
[caption id="attachment_72241" align="alignnone" width="2048"] 公司楼下的餐厅 Food Lab,最近世界杯。[/caption]
[caption id="attachment_72242" align="alignnone" width="864"]
公司楼下的餐厅 Food Lab,最近世界杯。[/caption]
[caption id="attachment_72242" align="alignnone" width="864"] 吃完午餐,娃玩了会手机,这是他最放松的时候了[/caption]
[caption id="attachment_72243" align="alignnone" width="1152"]
吃完午餐,娃玩了会手机,这是他最放松的时候了[/caption]
[caption id="attachment_72243" align="alignnone" width="1152"] 我打趣的和媳妇说:这号目前还没废,娃的手指很长,弹琴的样子真帅。[/caption]
[caption id="attachment_72247" align="alignnone" width="2048"]
我打趣的和媳妇说:这号目前还没废,娃的手指很长,弹琴的样子真帅。[/caption]
[caption id="attachment_72247" align="alignnone" width="2048"] 吃完午餐下班回家。[/caption]
[caption id="attachment_72248" align="alignnone" width="588"]
吃完午餐下班回家。[/caption]
[caption id="attachment_72248" align="alignnone" width="588"] 我现在最喜欢的月份就是 7 月和 8 月,因为这两个月学校终于不扣学费了。[/caption]
[show_file file="/var/www/wp-post-common/justyy.com/private-school.php"]
[show_posts keyword="私校"]
我现在最喜欢的月份就是 7 月和 8 月,因为这两个月学校终于不扣学费了。[/caption]
[show_file file="/var/www/wp-post-common/justyy.com/private-school.php"]
[show_posts keyword="私校"]